ludobloom
GAMES
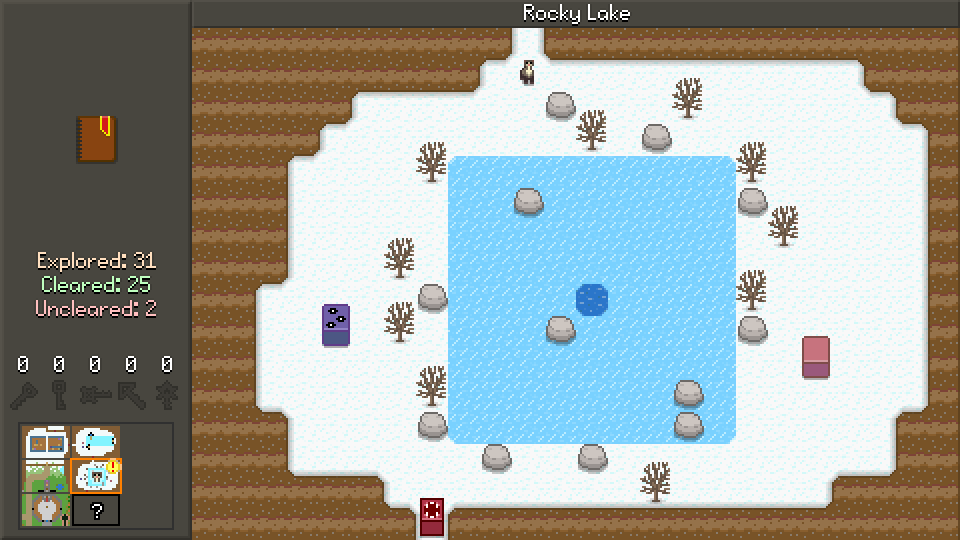
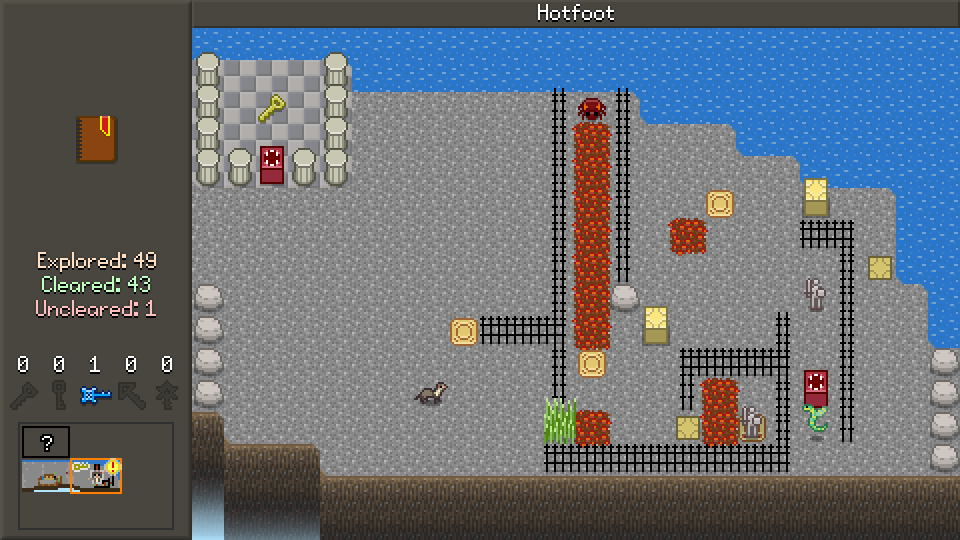
Leaf's Odyssey
A puzzle adventure game starring a ferret
Leaf's Odyssey on itch.io
Leaf's Odyssey on Steam
Soundtrack on Bandcamp
Download more worlds
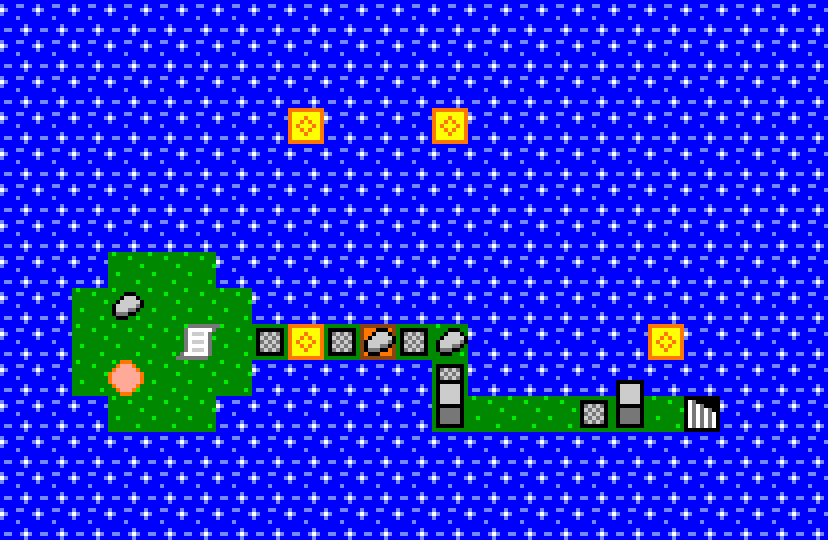
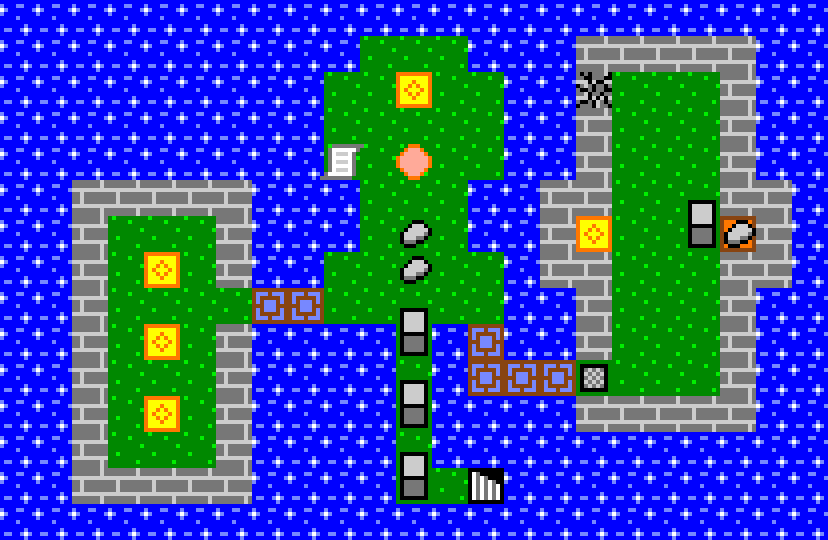
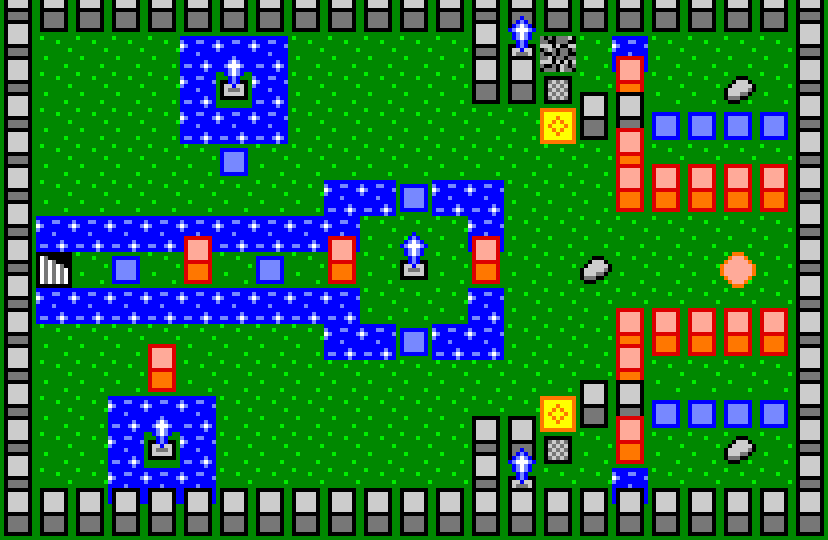
Throw Rock
A puzzle game about timing and positioning
Download for:
Windows
Linux
Mac
Throw Rock on itch.io
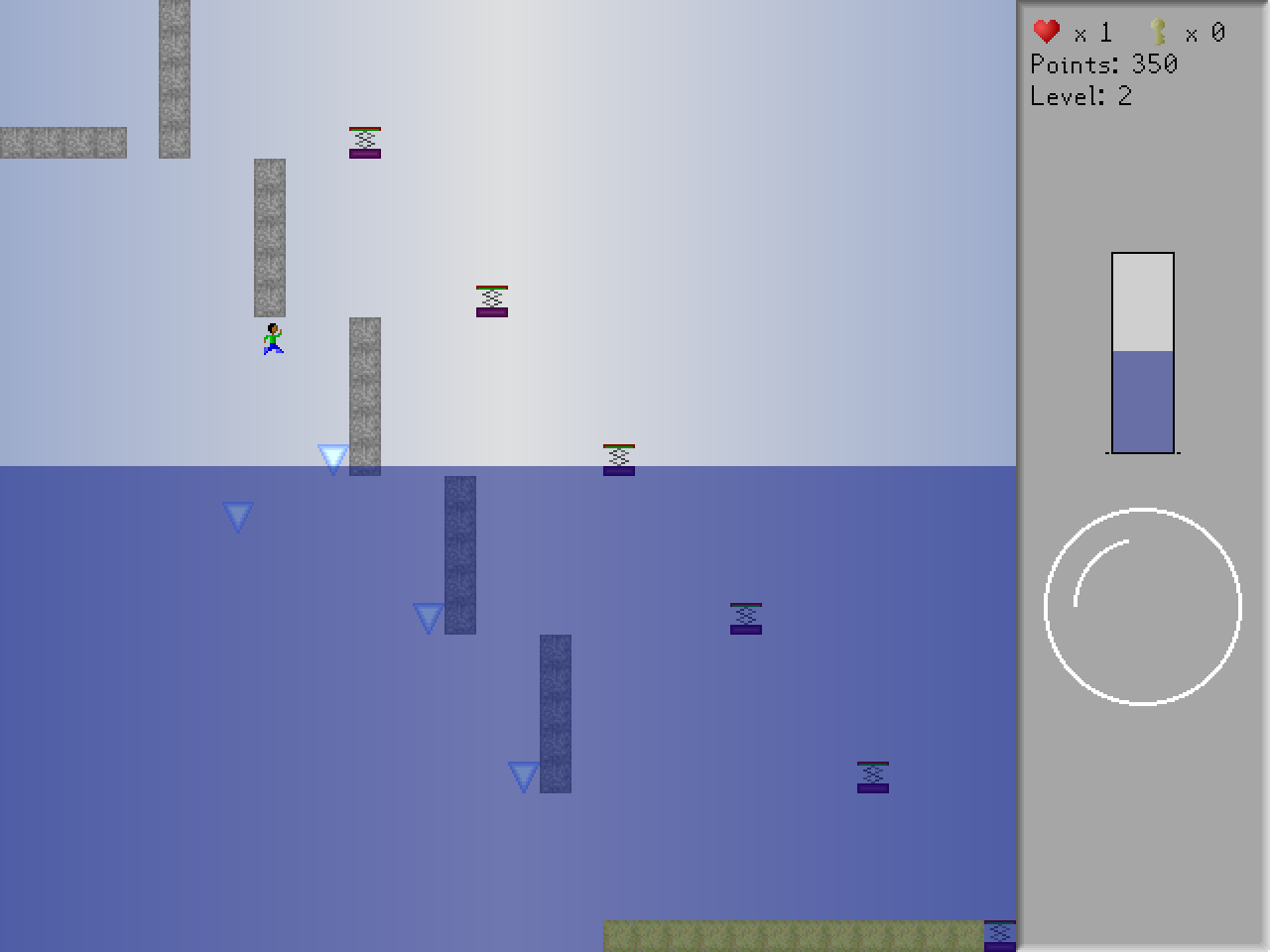
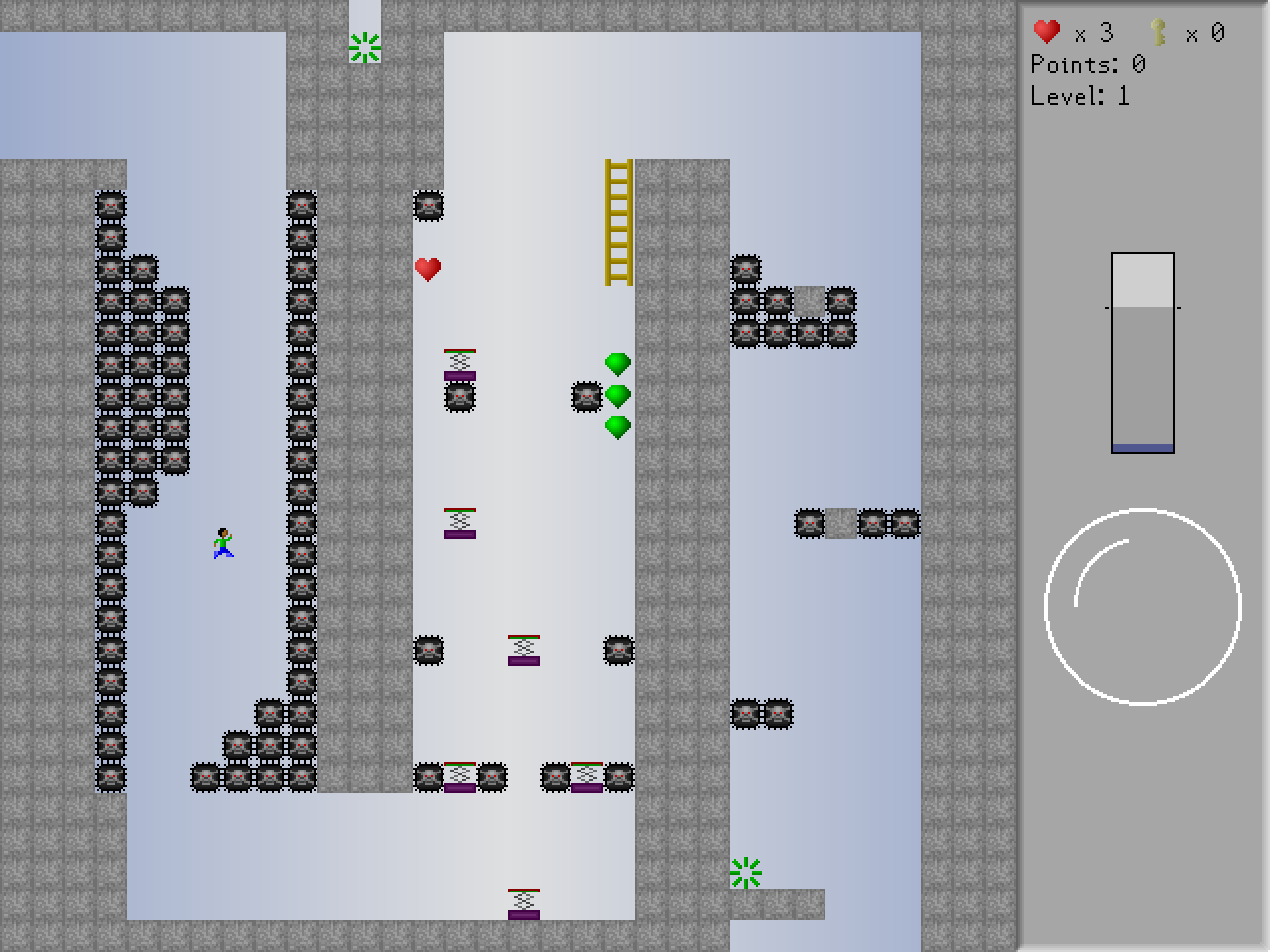
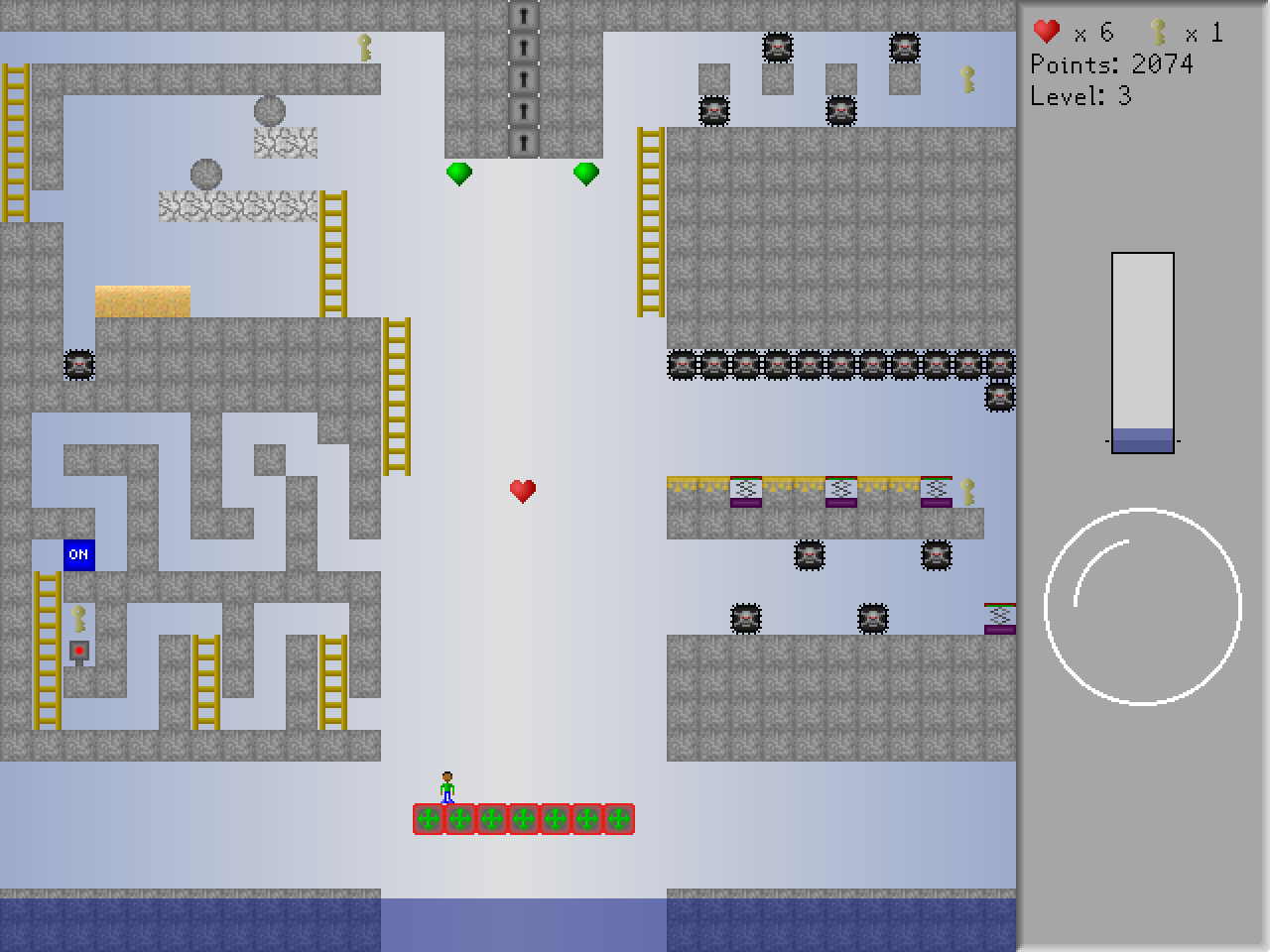
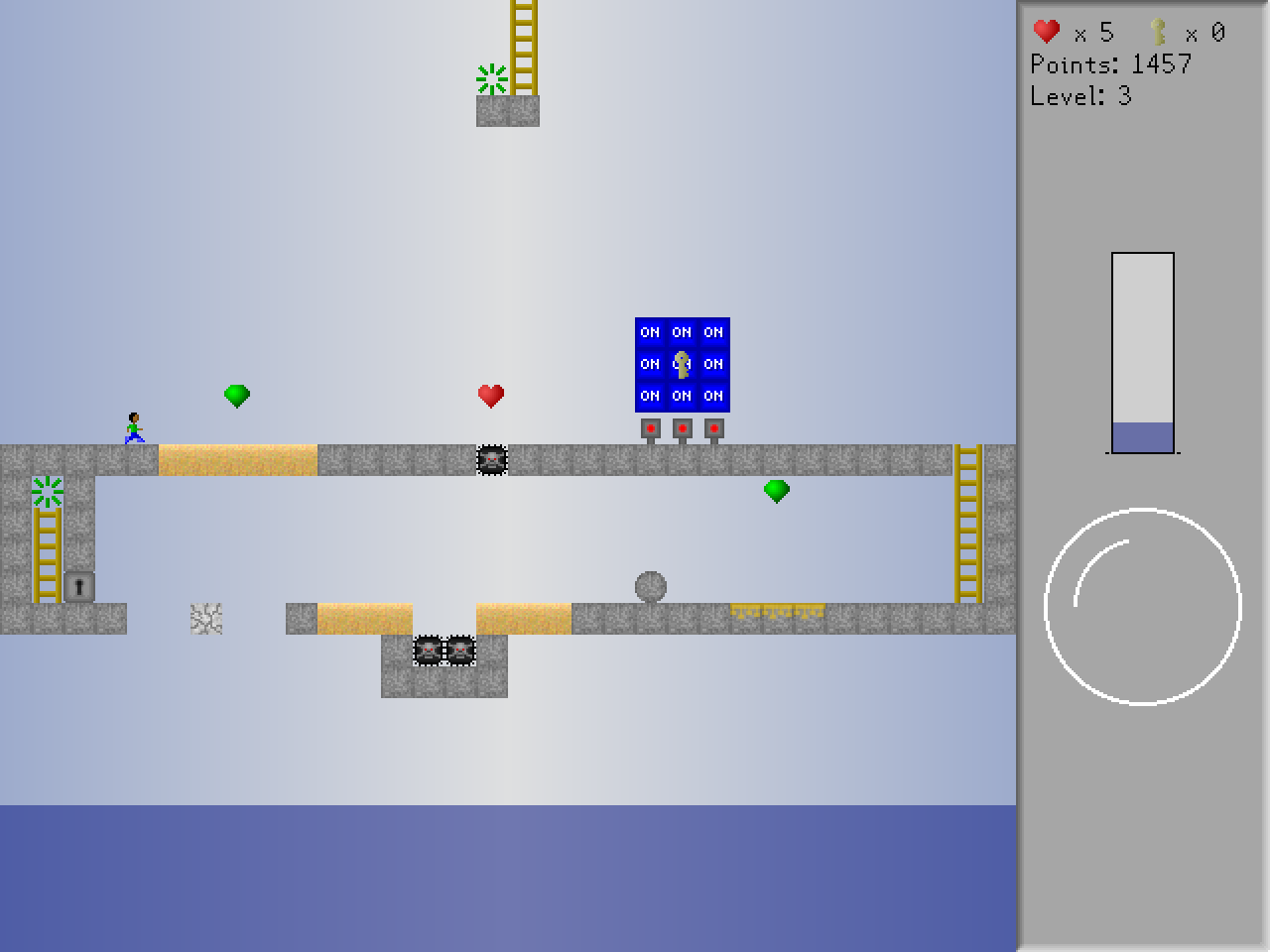
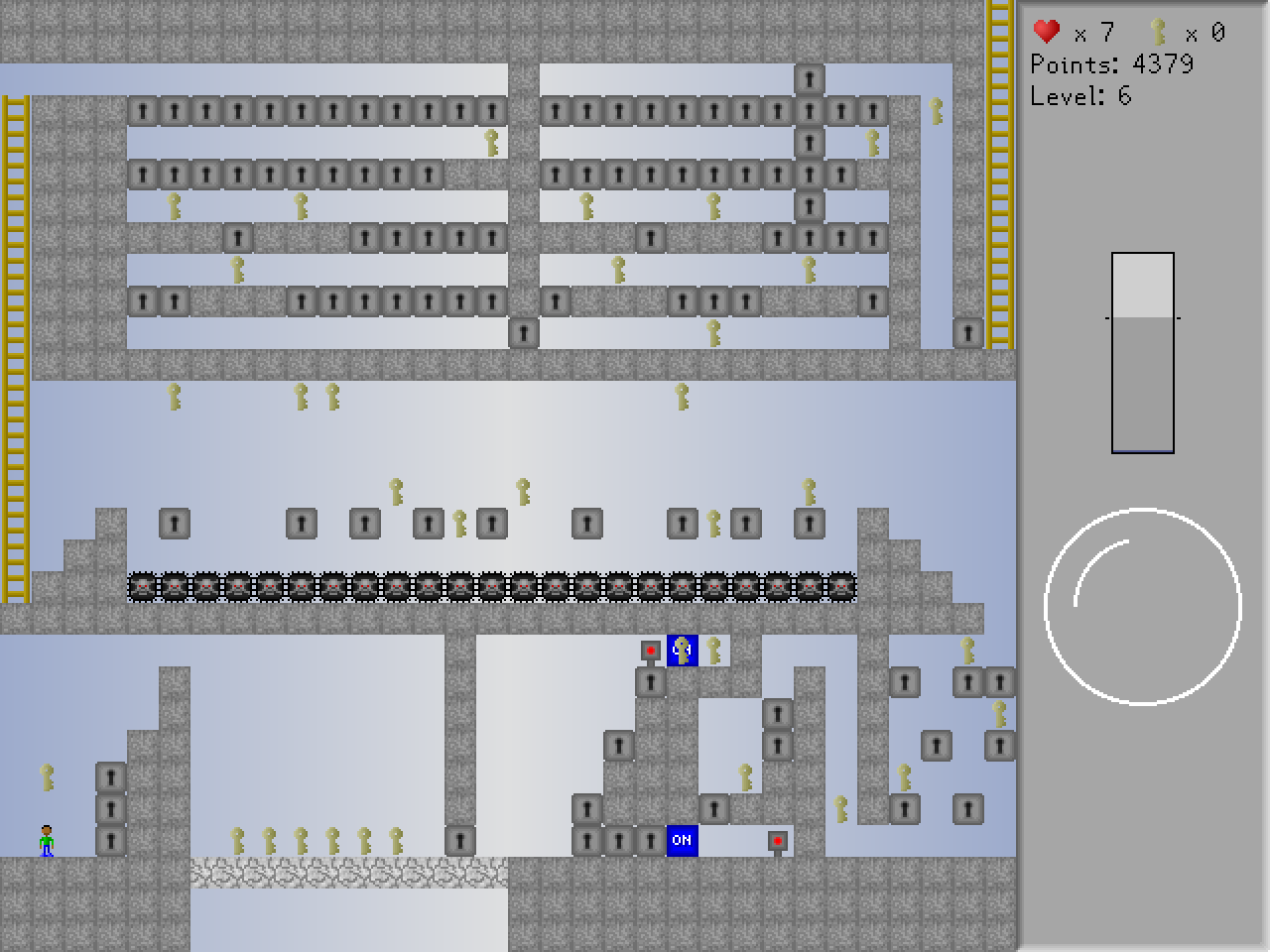
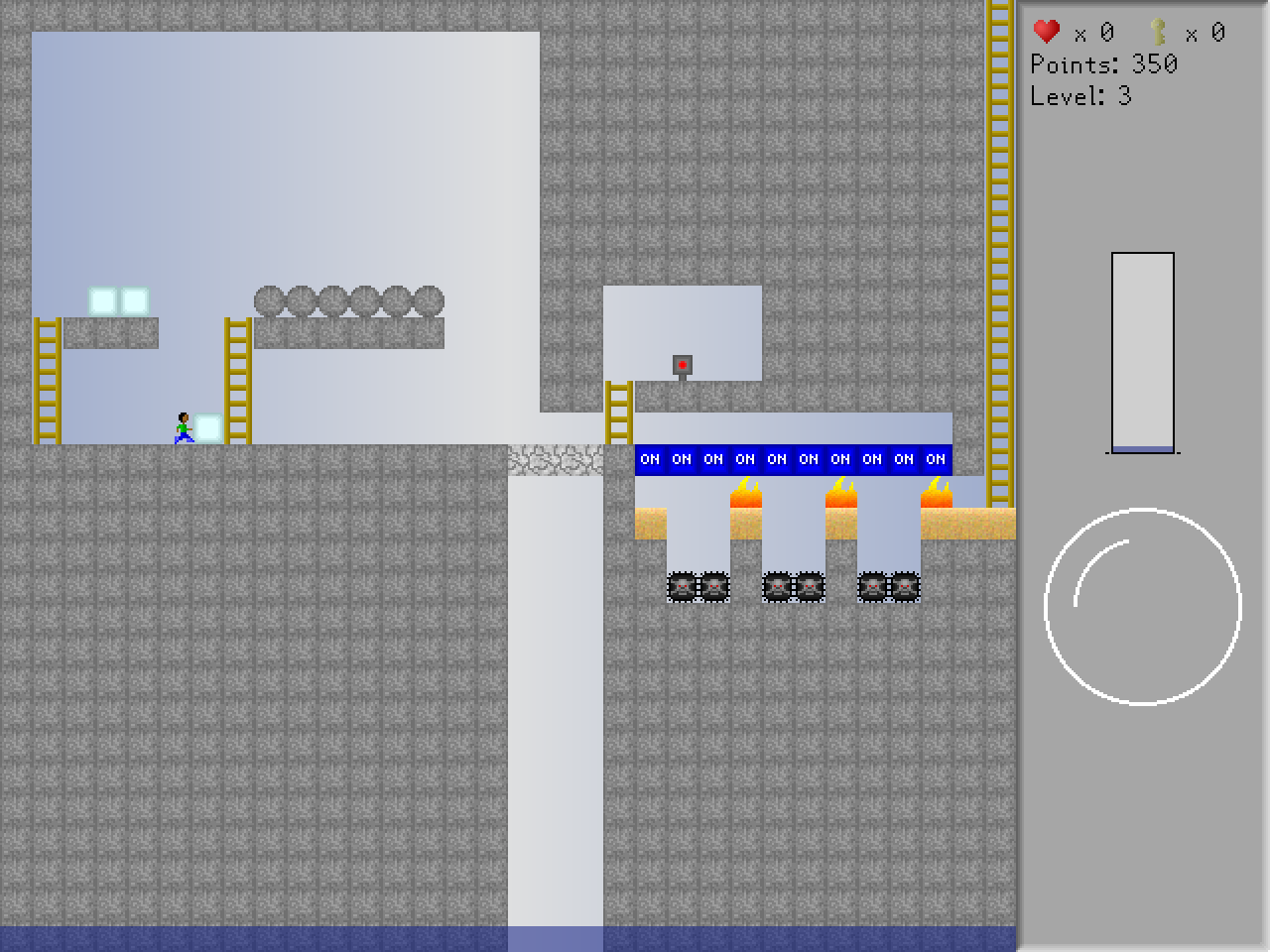
Water Tower Classic
Platform game with rising water
Download for:
Windows
Linux
Mac
Additional Downloads
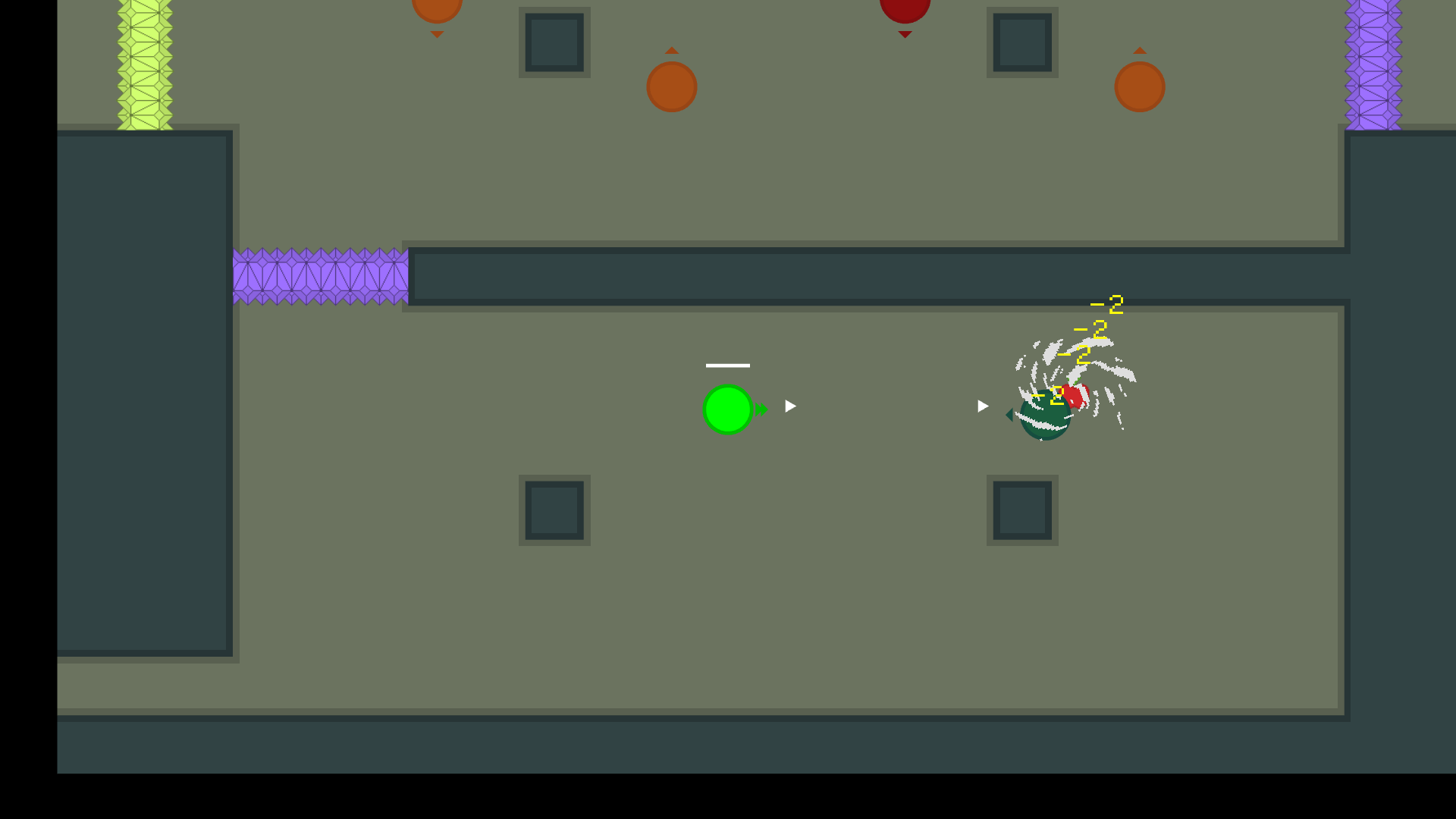
Convergence
Class-based dungeon brawler
Download for:
Windows
Linux
Mac
Source Code
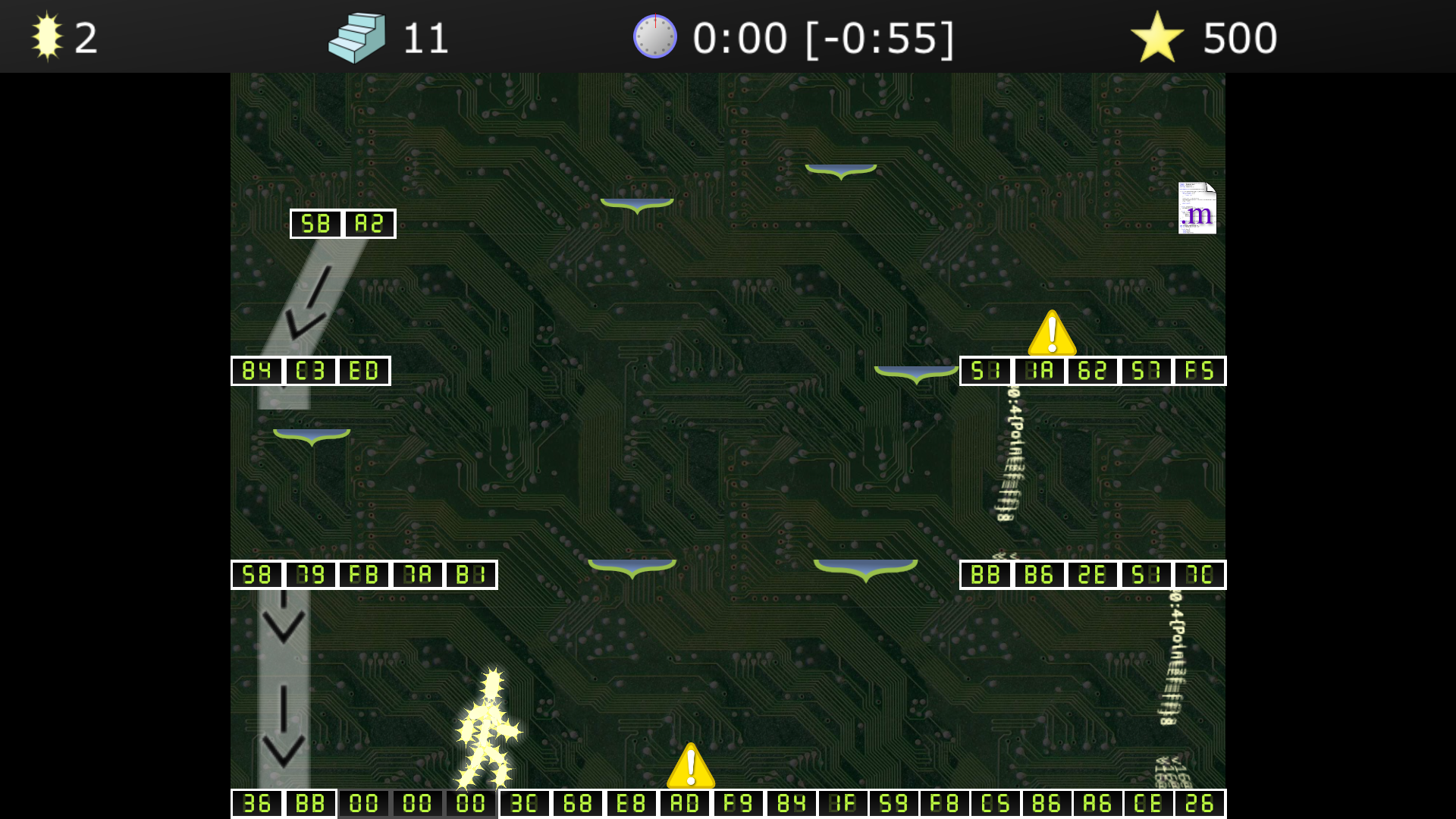
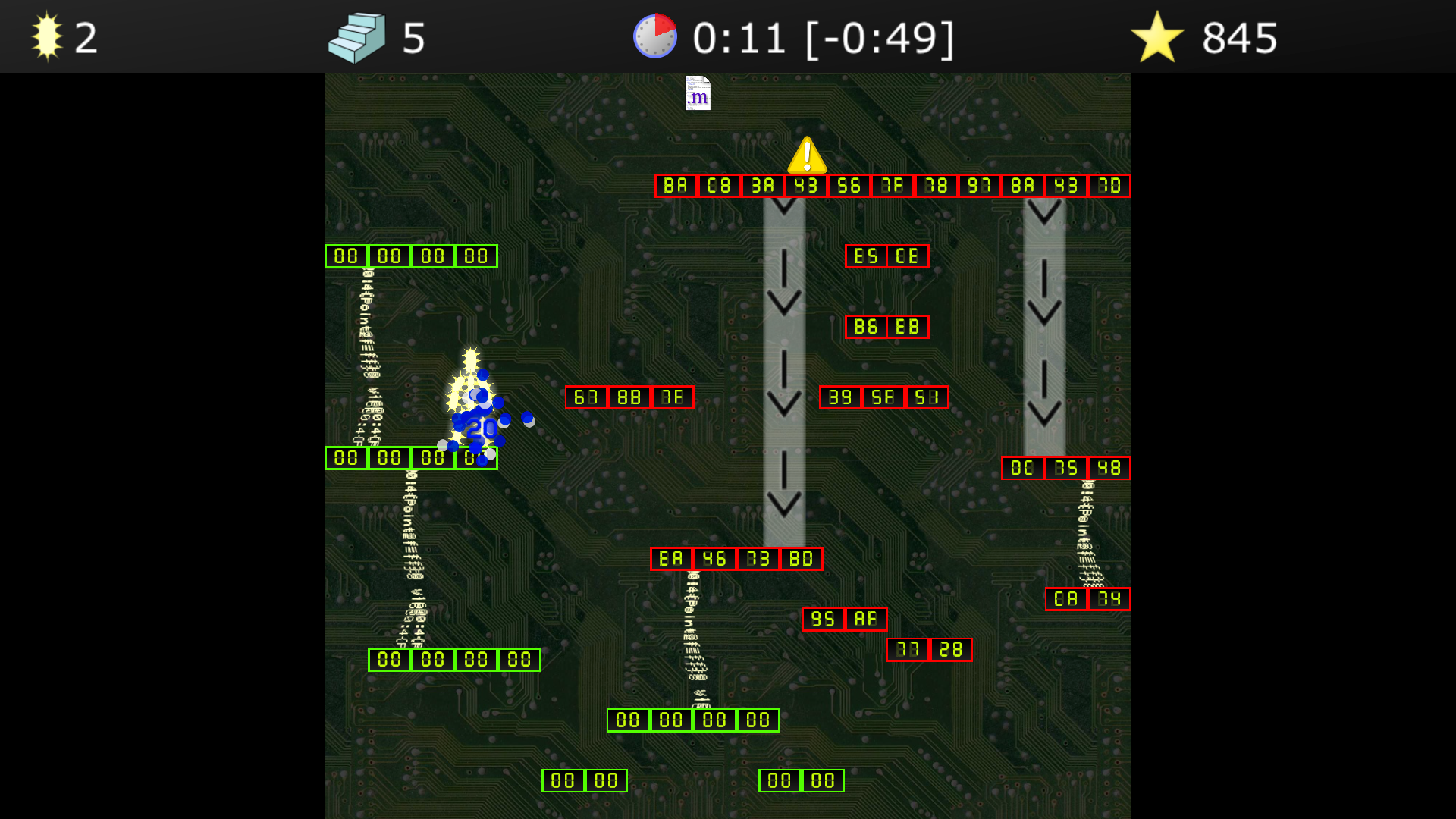
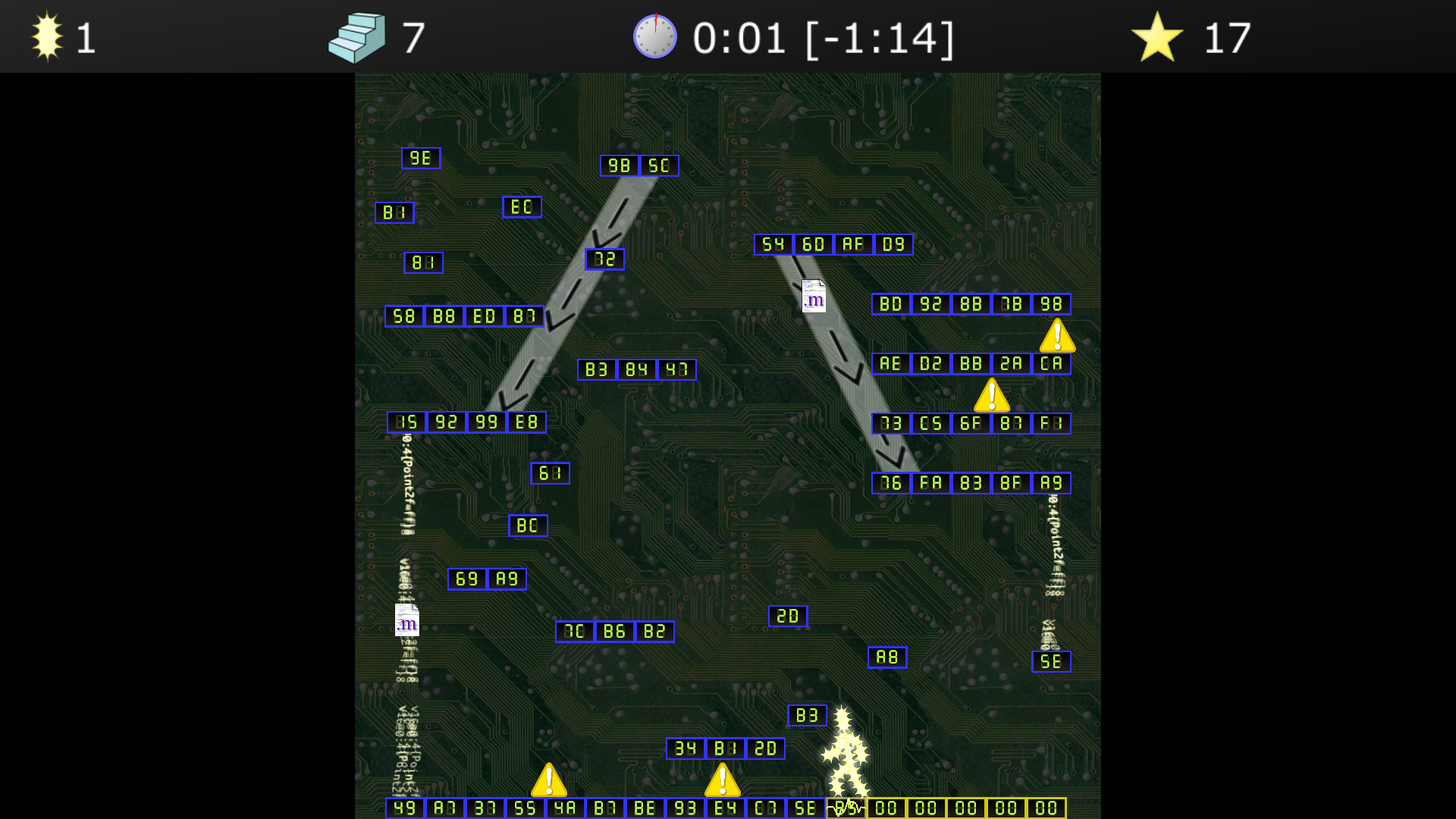
memset 0x801
Touch-all-floor-tiles platformer
Download for:
Mac (32-bit Intel)
old, unfinished, and experimental games
OTHER STUFF
Tutorials
Vector Math
Quaternion Math
Matrix Math
Fixed Timestep
Collision Detection
Libraries
Gamepad
Stem
Downloads
Glider PRO
CONTACT
alex@ludobloom.com
adiener
















 alex@ludobloom.com
alex@ludobloom.com adiener
adiener